
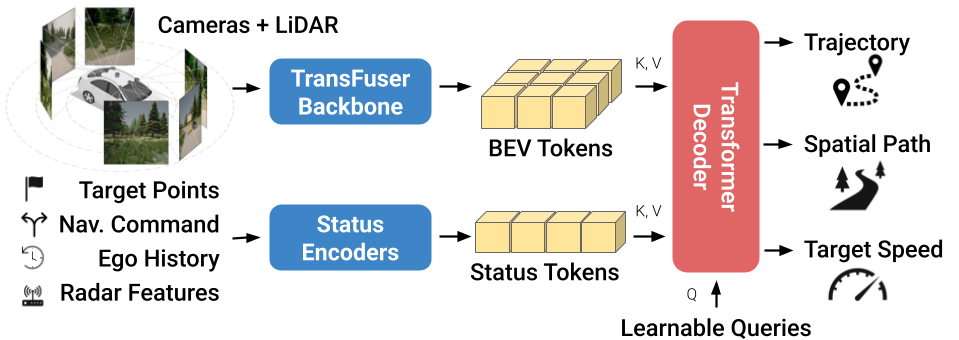
LEAD: Minimizing Learner-Expert Asymmetry in End-to-End Driving
Paper
•
2512.20563
•
Published
•
1
Project Page | Paper | Code
Official model weights for Latent TransFuser v6 (LTFv6), a NAVSIM checkpoint accompanies our paper LEAD: Minimizing Learner–Expert Asymmetry in End-to-End Driving.
We release the complete pipeline (covering scenario descriptions, expert driver, data preprocessing scripts, training code, and evaluation infrastructure) required to achieve state-of-the-art closed-loop performance on the Bench2Drive benchmark. Built around the CARLA simulator, the stack features a data-centric design with:
- Extensive visualization suite and runtime type validation for easier debugging.
- Optimized storage format, packs 72 hours of driving in ~200GB.
- Native support for NAVSIM and Waymo Vision-based E2E, with LEAD extending these benchmarks through closed-loop simulation and synthetic data for additional supervision during training
Find more information on https://github.com/autonomousvision/lead.
Install dependencies
pip install torch timm numpy opencv-python jaxtyping beartype omegaconf huggingface_hub
See example.ipynb to inspect data format and example inference.
We also provide example NAVSIM cache here.
Input:
Output:
waypoints: (N, 2) predicted positionsheadings: (N,) predicted anglesIf you find this work useful, please cite:
@article{Nguyen2025ARXIV,
title={LEAD: Minimizing Learner-Expert Asymmetry in End-to-End Driving},
author={Nguyen, Long and Fauth, Micha and Jaeger, Bernhard and Dauner, Daniel and Igl, Maximilian and Geiger, Andreas and Chitta, Kashyap},
journal={arXiv preprint arXiv:2512.20563},
year={2025}
}